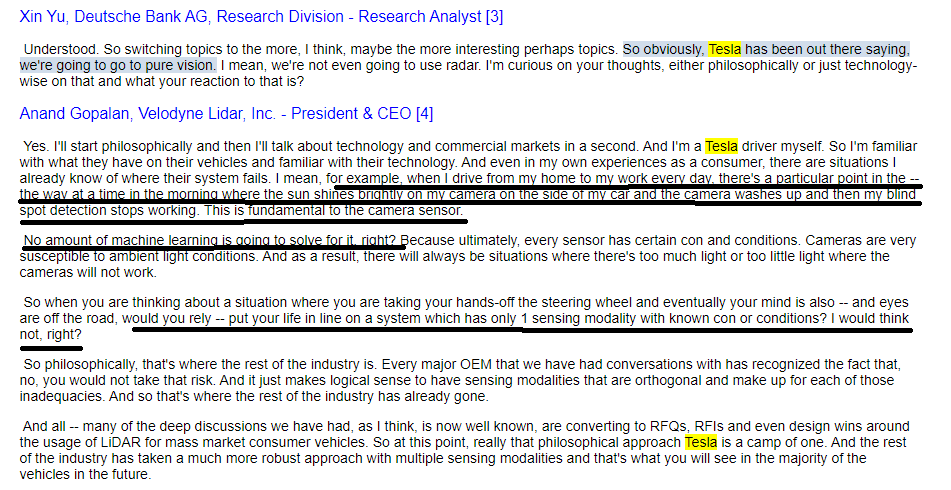
Aika vahvoja käsityksiä ja johtopäätöksiä vedit esityksestä. Ehkä kannattaa katsoa esitys uudestaan ilman pikakelausta kun tuntui että mukaan tuli liikaa omaa tulkintaasi.
Karpathy kävi läpi vision vs. lidar+hd maps kohtaa pari minuuttia puolen tunnin esityksestään(alkaa n. 7:57). Karpathy kävi paljon pidempään läpi miksi Tesla ei käytä enää tutkaa. Lidar+hd maps kohta oli mukana verrokkina skaalautumisesta ja se on Karpathyn mukaan yksi peruste miksi Tesla lähestyy tätä ongelmaa pelkästään kameroihin perustuen vaikka se on äärimmäisen vaikeaa. Se ei ollut tarkoitus olla kattava tutkimus kilpailijoiden lähestymisestä ogelmaan vaikka niin haluaisitkin esittää.
Koko Karpathyn esityksen keskeinen pointti on se että Tesla vastaa koko ketjusta, kamerapohjainen lähestymistapa toimii ja Teslalla on riittävän suuri ajoneuvokanta.
Esityksen loppukaneetti on: “We “uniquely” have all the puzzle pieces for FSD”
Jos kentällä olevia autonomisia autoja katsoo, voidaan sanoa että Karpathy on oikeammassa kuin sinun väitteesi. Vaikkapa Waymon systeemi on vaarallinen , kallis, ruma ja erittäin huonosti skaalautuva. Waymo käyttää kalliita ympäri autoa olevia sensoreita joista osa on myös katolla. Ilmeisesti lidarit eivät kuitenkaan lisää turvallisuutta kun niiden kanssa voi ajaa skootterikuskin yli. Waymon kattavuus tietyssä osassa Chanderia on ehkä eri mieltä geofencestä. Waymo ilmeisesti myös tarvitsee muutaman miljardin lisärahoituksen uuteen kaupunkiin laajentuakseen:D
Autonomisuuden etenemistä on mielenkiintoista seurata faktoihin pohjautuen. Totta. Ja olen samaa mieltä siitä että lidaria tuskin käytetään nykymuodossaan enää 10v kuluttua.