Taitaa olla Waymon sensori-stäkki vähän eri hintaluokkaa, tämä Mobileyen settihän on väitetysti 4000 taalaa tms per auto.
Mobileye vs. Waymo ei ole vertailukelpoisia siinä mielessä, että a) Waymo ei myy omaa järjestelmää b) kukaan ei ostaisi Waymon järjestelmää sen korkean kustannuksen takia c) Waymon järjestelmä ei skaalaudu globaalisti. Mobileyen järjestelmää taas on kehitetty nimenomaan siitä näkökulmasta, että sen kustannus on matala ja sen voi lyödä globaalisti mihin vain autoon ja käyttää sitä missäpäin maailmaa vain.
Mobileyen L3-järjestelmä maksaa $1500, L4 $3000 ja kaupalliseen käyttöön tarkoitettu Drive $15 000.

9 tykkäystä
https://x.com/aelluswamy/status/1771649240302850158?s=20
Handling many real-world situations, like construction, requires understanding and reasoning about the scene semantically and not just geometrically. That is why self-driving is an intelligence problem and not a sensor problem (i.e. needing LIDAR, Radar etc).
Siksi Tesla FSD on selvästi ainoa skaalaava ja teknologia joka toimii missä tahansa.
Saako olla vähän eri mieltä? Tesla osoittaa mm. tällä ja muilla vastaavilla FSD V12-videoilla, että on mahdollista tehdä hyvissä näköolosuhteissa varsin hyvin toimiva FSD ilman tutkia ja muita sensoreita. Eihän se tarkoita kuitenkaan sitä, että FSD:stä tulisi huonompi tai vähemmän skaalattava, jos siihen lisätään kameroiden puutteita tukevia sensoreita. Olen samaa mieltä siitä, että FSD V12 vaikuttaa yllättävänkin hyvältä sen perusteella, mitä siitä on nähty. En kuitenkaan näe, miten tämän perusteella voitaisiin tyrmätä muut teknologiat (kameroiden tukeminen muilla sensoreilla) huonommiksi.
Oman Teslani kanssa olen todennut, että automatiikan pitää olla erittäin luotettava ja toimintavarma, että sitä tulee käytettyä. Vaikkapa ”liian” fiksu vakkari jää paljon vähemmälle käytölle kuin edellisen auton vähemmän kehittynyt vastaava, koska se tekee säännöllisesti typeriä jarrutuksia turhissa paikoissa. Vaikka yli 99 % ajasta vakkari toimii hyvin, romuttaa ajoittainen sekoilu luottamuksen siihen niin, että sitä tulee enää käytettyä vain isoilla ja leveillä teillä hyvissä olosuhteissa. Autopilotin kanssa tulee olemaan sama juttu. Oli tekniikka sitten mikä tahansa, sen toimintavarmuus pitää saada erittäin lähelle 100 % että siitä on oikeasti hyötyä. Jos vedetään vähän mutkia suoriksi, niin vaikkapa 99,9 % tarkoittaisi sitä, että kerran tuhannessa tilanteessa tulee kolari. Tämä olisi kestämätöntä. Vielä ei olla nähty sitä, millä tekniikalla nuo ihan viimeiset desimaalit saadaan kuntoon hankalammissakin olosuhteissa.
3 tykkäystä
Totta kai järjestelmän skaalautuvuus heikkenee mitä kalliimpi se on (enemmän komponentteja, monimutkaisempi järjestelmä, hankalampi asentaa eri autoihin jne.). Suuri avoin kysymys vielä on, riittääkö pelkät kamerat joka tilanteeseen vai ei. Ja vaikka data osoittaisi että “riittää” (mitä se sitten tarkoittaakin) niin mitä sanoo lainsäätäjät? Veikkaan että esimerkiksi Teslan kilpailijat joiden tekniikka perustuu useampaan erilaiseen sensoriin tulevat lobbaamaan rajusti Teslan ratkaisua vastaan.
Tämäkin riippuu siitä miten tekniikkaa käytetään, millaisessa ympäristössä ja kuka kantaa vastuun. Esimerkiksi Waymo on aloittanut robottitaksitoiminnan kaupungeissa ja kantaa vastuun mahdollisista kolareista (joita on Waymollekin sattunut). Kaupunkiajo on hidasta jolloin kolarien vaikutukset on yleensä melko pieniä. Se on aivan eri tilanne kuin se että softa laitetaan viiteen miljoonaan yksityiskäyttäjän autoon ja sanotaan että painakaa nappia, me vastaamme auton turvallisuudesta. Kyse on siis riskien punnitsemisesta suhteessa mahdollisiin hyviin puoliin. 999 onnistunutta kaupunkiajoa saattaa jonkun excelissä näyttää jo hyväksyttävältä jos yksi ajo keskeytyy kevyeen osumaan jossa kukaan ei loukkaannu. Tämä siis vaan karkeana eimerkkinä eikä minään kannanottona hyväksyttävään riskitasoon.
1 tykkäys
FSD päivitysrumba jatkuu. Beta 12.3.1 menossa työntekijöiden testiin. Mukana ilmeisesti myös Auto Park-toiminto:
https://twitter.com/teslascope/status/1771887192295837935?t=fb0sUV3wv3GgdNXpZ-euVQ&s=19
https://twitter.com/raderje/status/1771905762308022761?t=-QGVGuftPggG8aHZEaGnVQ&s=19
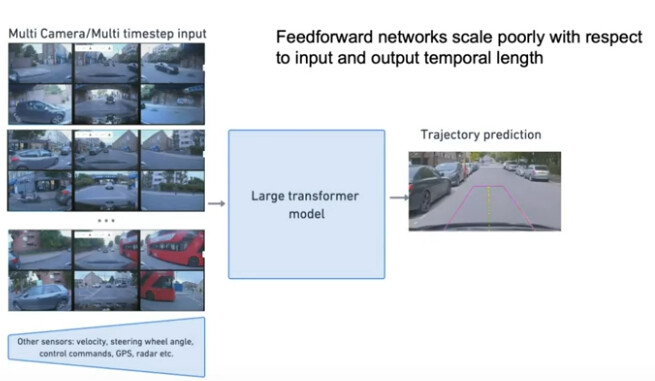
Nyt kun myös Waymo ja muut perinteisen ratkaisun käyttäjät käyttävät transformeria, on ero End2End ratkaisuun mielestäni karkeasti alla oleva
Perinteinen ratkaisu uudella tekniikalla (Transformers)
Objektit tunnistetaan ja ne viedään ulkoisten integraatioiden kanssa Transformeriin, joka ennustaa tulevat liikeradat.

End2End
Järjestelmä tunnistaa sisäisesti objektit vie ne Transformeriin ja ennustaa tulevat liikeradat

End2End voi osata tunnistaa saumattomammin kaikkien ulkoisten kohteiden suhteen toisiinsa ja voi osata siksi ajaa luonnollisemmin. Toisaalta vaatinee paljon enemmän opetusdataa, kuin perinteinen menetelmä.
Perinteinen menetelmä on toisaalta hallitumpi ja mahdollistanee helpommin säännöt ja integraatiot
Jos Tesla saa koulutettua järjestelmänsä riittävällä datamäärällä reagoimaan vaadittaviin tilanteisiin, voi sen ratkaisu olla vahvoilla tason 2 ja 3 järjestelmissä.
Aika näyttää, vaativatko viranomaiset tasoille 4 ja 5 integraatioita liikenteen digitaalisaatiosta ja muita sensoreita. Itse näin olettaisin
Edit Itse ennustan, että tulevaisuuden ratkaisu on perinteisen ratkaisun integrointi End2End-ratkaisuun
Wayve AI Driver End2End
Tässä video, jossa Wayve AI Driver ohjaa autoa autonomisesti End2End-arkkitehtuurilla, kuten Tesla.
Wayven CEO Alex Kendall tuntee Elon Muskin ja saattaa olla yksi syy sille, miksi Tesla lähti End2End-arkkitehtuuriin

Tässä on ylätason konseptikuva, joka ei luonnollisesti ole noin yksinkertainen käytännössä.
End2End-ratkaisun ongelma on ollut se, että kukaan ei tiedä, mihin arvoon parametrit asettuvat ja miten se toimii eri käyttötapauksissa.
Wayve käyttää multimodal ratkaisua, jossa ratkaisu oppii tunnistamaan mikä teksti vastaa mitäkin käytöstä. Näin simulaattoria voidaan ohjata tekstillä ja siltä voidaan kysyä kuin ihmiseltä, miksi se tekee mitäkin tekstillä

5 tykkäystä
@Jukka_Lepikko Eikö L3+DMS ratkaise suurimmat ongelmat henk.autoilussa? Suurimmat onnettomuuden aiheuttajat lienee ylinopeus, päihtyneenä/väsyneenä ajaminen ja huonot ajotavat. Ajokyvyn menetys/vanhuus/sairaudet.
Tästä eteenpäin hyödyt pienenee.
Autojen määrä, ajokilometrien lisääntyminen kuluttaa maapalloa. Panostaminen julkisen liikenteen kehittämiseen lienee tärkein kehityksen kohde, jos ekologisesti ajattelee. Suurkaupunkien ongelmat ei muuten ratkea.
Ei mulla ole mitään syytä Teslaa vihata. Tekee ihan hyviä asioita pääosin. Sijoittajana on tärkeä etsiä olennaisuuksia. Muskin toimintaa olen lähinnä arvostellut. Boring-yhtiön hankkeethan on ajateltava osana julkisen liikenteen parantamisena. Ei niihinkään L5-tasoa tarvita.
FSD:stä on varmaan tehty puolueettomia tutkimuksia eri tasojen tarpeellisuudesta. En ole saanut aikaiseksi niitä etsiä.
4 tykkäystä
En oikein hahmota tätä logiikkaa. Eikö L5 FSD nimenomaan todennäköisesti vähentäisi autojen määrää? Nykyäänhän autot seisoo paikoillaan valtaosan ajasta. Uusiutuvalla energialla kulkeva robotaksi kovalla käyttöasteella kuulostaa melko hyvältä liikkumismuodolta.
3 tykkäystä
Epäilen. Ne tulee vain lisäksi uutena palveluna. Niissäkin veikkaan monessa olevan kuskin, koska täytyyhän vanhuksia auttaa kyytiin, nostella kantamuksia jne. Tai sitten ne on L3-tason Ubereita ja mahdollinen L5 taksi on vain rajatulle palvelulle/reitille.
1 tykkäys
Niin, aivan kuin Waymoissakin on kuski? Eiku eihän niissä ole.
L5-tason auto on L3-tason Uber? Mitä?
Mitä ihmettä selität? L5 tarkoittaa nimenomaan sitä että alue ei ole rajattu.
2 tykkäystä
Automaattiajolla julkista liikennettä voi juuri kehittää huomattavasti paremmaksi. Pienempiä ja ketterempiä pikkubusseja mutta tiheämmillä vuoroväleillä ja laajemmalla peitolla.
1 tykkäys
Julkisessa liikenteessä automaattiajoahan on ollut jo pitkään:
Hei vaan kaikille ja niille erityisesti ketkä tuntevat Mobileyeta tarkemmin. Suuntasin tämän vastauksen Jukalle, koska hän ainakin tuntee MobilEyeta. Eikö MobilEyessa tulisi ottaa huomioon Israel altistus? Iso osa (ehkä selvästi suurin osa?) yhtiön toiminnasta tapahtuu Israelissa fyysisesti. Yli puolet yhtiön sivuilla olevista työpaikkailmoituksista on Israeliin. Onko teidän mielestä tätä otettu huomioon osakkeessa?
Omistan Inmodea, Israelilaista yhtiötä, jossa osakkeen hinnoitteluun on vaikuttanut suuresti kärjistynyt tilanne Israelissa ja sen ympärillä. Heilläkään ei käytännössä myyntiä yhtään Israeliin niin kuin ei Mobileyellakaan. Inmoden osake olisi vaan helposti tuplat, jos sotimista/rähinää siellä suunnilla ei olisi. Hamasin hyökkäys Israeliin ja sen jälkeen tapahtuneet eskalaatiot eivät näy Mobileyen kurssissa niinä hetkinä niin selvästi kuin Inmodessa.
1 tykkäys
Oon ihmetelly, että aika vähän Mobileyen kurssi putos esim Iran-Israel-konfliktista. Osarin myötä kyllä tänään -6,4 %
Kiinnostaisi kuulla näkemyksiä osarista.
5 tykkäystä
Teslapalstalla meni tunteisiin, mutta kysytäänpä täällä, mitä mieltä parvialy on:
Kumpi on Teslassa tai ylipäätään jossakin sähköautossa ensin, toimiva FSD (ajo ilman ohjauspyörää) vai kvanttitietokone (joka tarvitaan FSD:n pyörittämiseen)?
Toimiva ollakseen FSD ei siis ole mikään ajoavustin, vaan järjestelmä, jonka avulla auto liikkuu 24/7/365 jokaisella autoille tarkoitetulla alueella.
1 tykkäys
Sanoisin että kvanttitietokone. 24/7/365 kaikilla maailman teillä tulee olemaan sen verran haastava taklata, ja koska en tiedä kvanttitietokoneista tuon taivaallista niin tämä on valistunein arvaukseni.
Muutenkin jännän äärellä tässä seurannut tätä teslan vain kameroihin perustuvaa ja esim mobileyen useisiin eri sensoreihin perustuvaa keskustelua ![]() näin kokemusperäisesti useita erityyppisiä sensoreita hyödyntävänä sanoisin, että useita sensoreita tarvitaan kattamaan useita erityyppisiä olosuhteita. En ole löytänyt vielä yhtään sensoria joka oikeasti olisi ylivertainen kaikessa. Tutkassa on hyvät puolet, lidarissa, flirssä, SARssa, perus näkyvän valon kamera jne jne on hyvät puolet.
näin kokemusperäisesti useita erityyppisiä sensoreita hyödyntävänä sanoisin, että useita sensoreita tarvitaan kattamaan useita erityyppisiä olosuhteita. En ole löytänyt vielä yhtään sensoria joka oikeasti olisi ylivertainen kaikessa. Tutkassa on hyvät puolet, lidarissa, flirssä, SARssa, perus näkyvän valon kamera jne jne on hyvät puolet.
Siispä kokemusperäisesti väittäisin, että nykyisillä sensoreilla ei tulla pääsemään 24/7/365 aitoon täysin itsestään ajavaan autoon kaikilla teillä kaikissa olosuhteissa. Toki monisensorilaitteilla teoriassa voisi päästä melko lähelle, ajoneuvo saattaisi vain olla melko kallis näillä tiedoin:)
Kirjoitan näin silläkin uhalla, vaikka tiedän, että vain kameroihin perustuva kannattajakunta on paikoin melko äänekäs. Olen lähes varma, että ovat silti väärässä.
Edit.1 Toivoisin, että kyettäisiin tekemään silti järjestelmä joka olisi autonominen joissain olosuhteissa ja joihinkin olosuhteisiin specsattu. Kun olosuhteet muuttuvat järjestelmän specsausta huonommiksi, laite ilmoittaa käyttäjälle, että “nyt ajan parkkiin jos et itse ota autoa ohjattavaksesi”. Tai jotakin vastaavaa. Saataisiin kuitenkin käyttöön näitä mukavamman liikkumisen välineitä. Ja siis toivon tätä ihan kuluttajana, en sijoittajana.
4 tykkäystä
Välimallin ratkaisu täyttä autonomiaa odotellessa, israelilainen Ottopia on lanseeraamassa etäkuljettajapalvelun. Kohteena autot joissa riittävä kamera- ja tietokonevarustus. Maksiminopeus rajattu 55km/h.
1 tykkäys
Rimac/Bugatti/Verne(?) mikälie se emofirma onkaan, julkaisi oman versionsa robotaxista. Valinnut MobilEyen ohjelmistokehittäjäkseen, voi kiinnosttaa esim. @timontti 'a.
Alle parit videot, joissa tuosta kerrotaan enempi.


Sekä artikkelin muodossa:
Alkusilmäykseltä vaikuttaa samalta hypeltä kuin muidenkin kyseisten laitosten kanssa, eikä mitään voi sanoa ennen kuin saadaan reaalimaailman koe"ajoja" ulos. Hieno sinällään että kilpailua tulee tännekin puolelle enemmän, ja Rimac ei ainakaan innovaation puutteesta kärsi. Kahtellaan.
2 tykkäystä
Waymo has opened its robotaxi service in San Francisco to the general public . On Tuesday, the autonomous-vehicle company that’s a subsidiary of Alphabet Inc. GOOGL, +2.68% GOOG, +2.65% said rides would be available to anyone with the Waymo app and a credit card, 24/7, across San Francisco.
3 tykkäystä