Nyt kun myös Waymo ja muut perinteisen ratkaisun käyttäjät käyttävät transformeria, on ero End2End ratkaisuun mielestäni karkeasti alla oleva
Perinteinen ratkaisu uudella tekniikalla (Transformers)
Objektit tunnistetaan ja ne viedään ulkoisten integraatioiden kanssa Transformeriin, joka ennustaa tulevat liikeradat.
End2End
Järjestelmä tunnistaa sisäisesti objektit vie ne Transformeriin ja ennustaa tulevat liikeradat
End2End voi osata tunnistaa saumattomammin kaikkien ulkoisten kohteiden suhteen toisiinsa ja voi osata siksi ajaa luonnollisemmin. Toisaalta vaatinee paljon enemmän opetusdataa, kuin perinteinen menetelmä.
Perinteinen menetelmä on toisaalta hallitumpi ja mahdollistanee helpommin säännöt ja integraatiot
Jos Tesla saa koulutettua järjestelmänsä riittävällä datamäärällä reagoimaan vaadittaviin tilanteisiin, voi sen ratkaisu olla vahvoilla tason 2 ja 3 järjestelmissä.
Aika näyttää, vaativatko viranomaiset tasoille 4 ja 5 integraatioita liikenteen digitaalisaatiosta ja muita sensoreita. Itse näin olettaisin
Edit Itse ennustan, että tulevaisuuden ratkaisu on perinteisen ratkaisun integrointi End2End-ratkaisuun
Wayve AI Driver End2End
Tässä video, jossa Wayve AI Driver ohjaa autoa autonomisesti End2End-arkkitehtuurilla, kuten Tesla.
Wayven CEO Alex Kendall tuntee Elon Muskin ja saattaa olla yksi syy sille, miksi Tesla lähti End2End-arkkitehtuuriin
Tässä on ylätason konseptikuva, joka ei luonnollisesti ole noin yksinkertainen käytännössä.
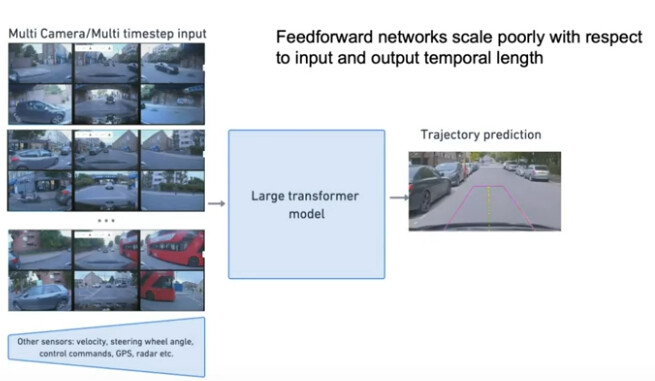
End2End-ratkaisun ongelma on ollut se, että kukaan ei tiedä, mihin arvoon parametrit asettuvat ja miten se toimii eri käyttötapauksissa.
Wayve käyttää multimodal ratkaisua, jossa ratkaisu oppii tunnistamaan mikä teksti vastaa mitäkin käytöstä. Näin simulaattoria voidaan ohjata tekstillä ja siltä voidaan kysyä kuin ihmiseltä, miksi se tekee mitäkin tekstillä





